电磁避震器/阻尼器
用电流大小实时控制阻尼强弱,配合以传感器及控制算法,以达到主动消除震动的效果,响应时间可达到毫秒级
了解更多

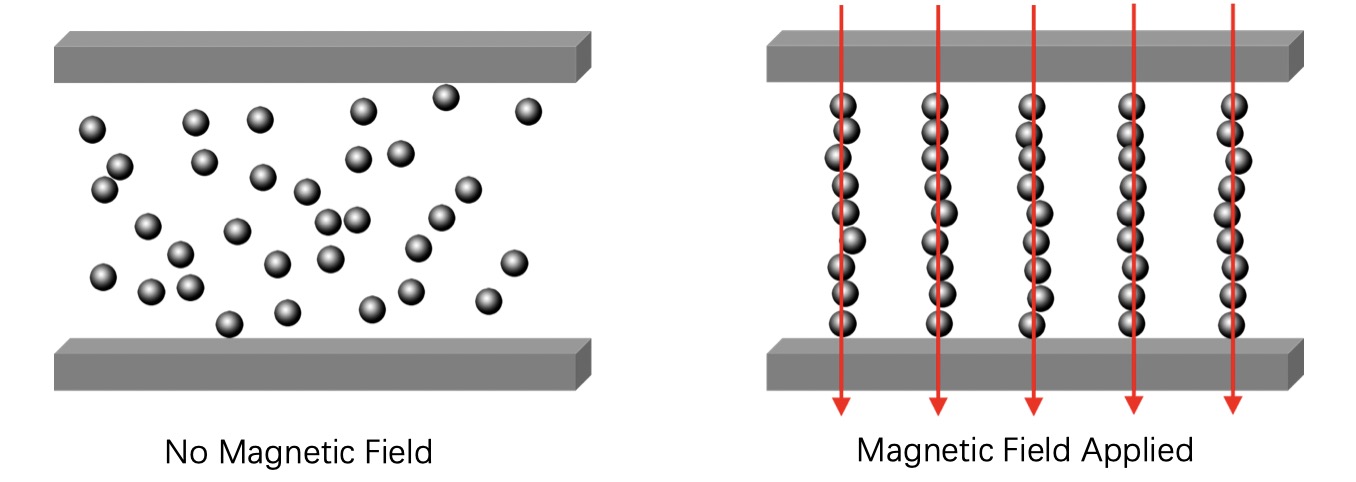
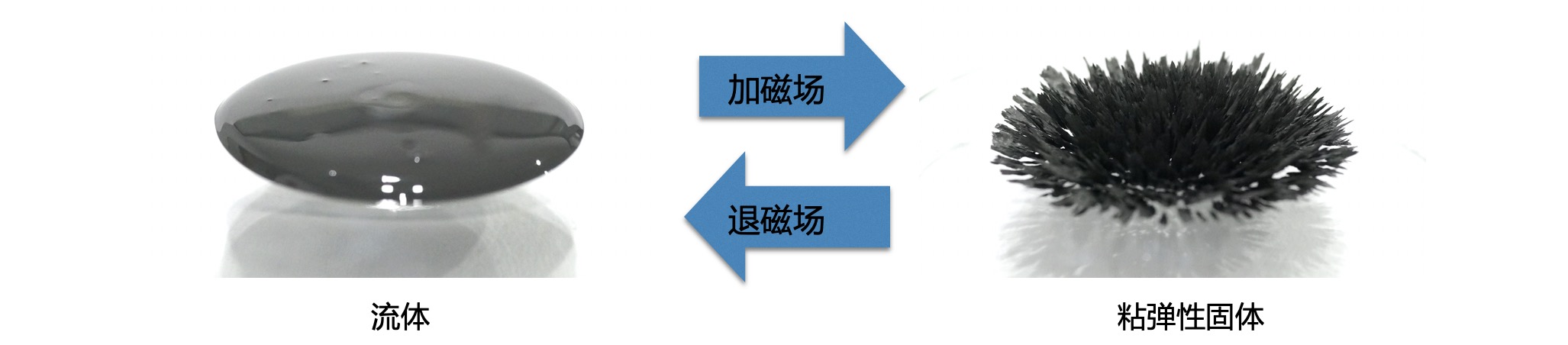
磁流变流体( Magnetorheological Fluids ,简写MR或MRF)是一种智能材料,当通过或加入磁场时,流体变成粘弹性固体;当磁场消失,形成的粘弹性固体又变回可流动的液体。
磁流变流体主要由磁性颗粒与载液构成。当磁场通过时,磁性颗粒会沿磁力线方向进行排列,颗粒之间因为磁力的相互作用而产生应力,从而让材料呈现出固态特征。这种固液态的转换是一种可逆可控的过程。
磁流变流体的工作方式通常为以下两种:
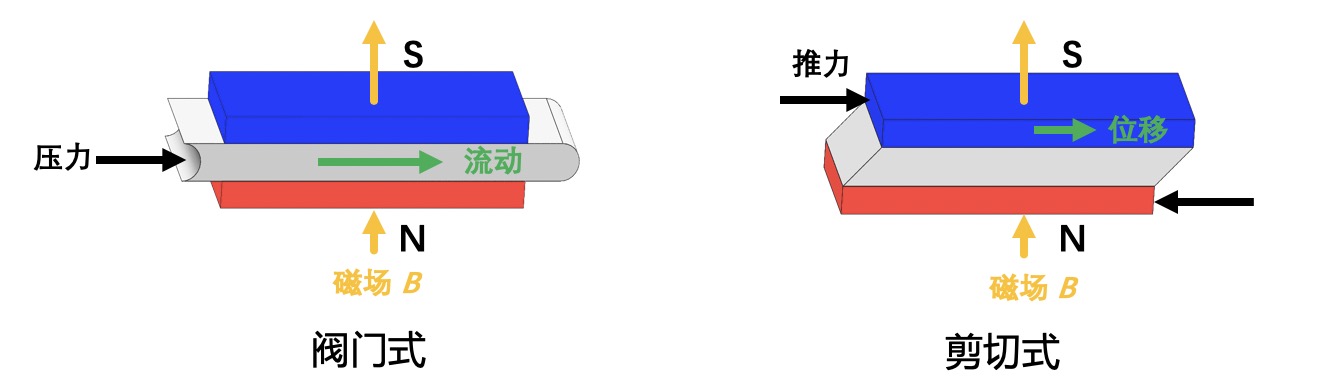
由于流体屈服应力可以通过磁场的强弱进行控制,因此,被应用于汽车、工程机械、桥梁、建筑以及军事装备等领域,对波动、震动、噪音以及力传递等实现精准的主动智能控制。
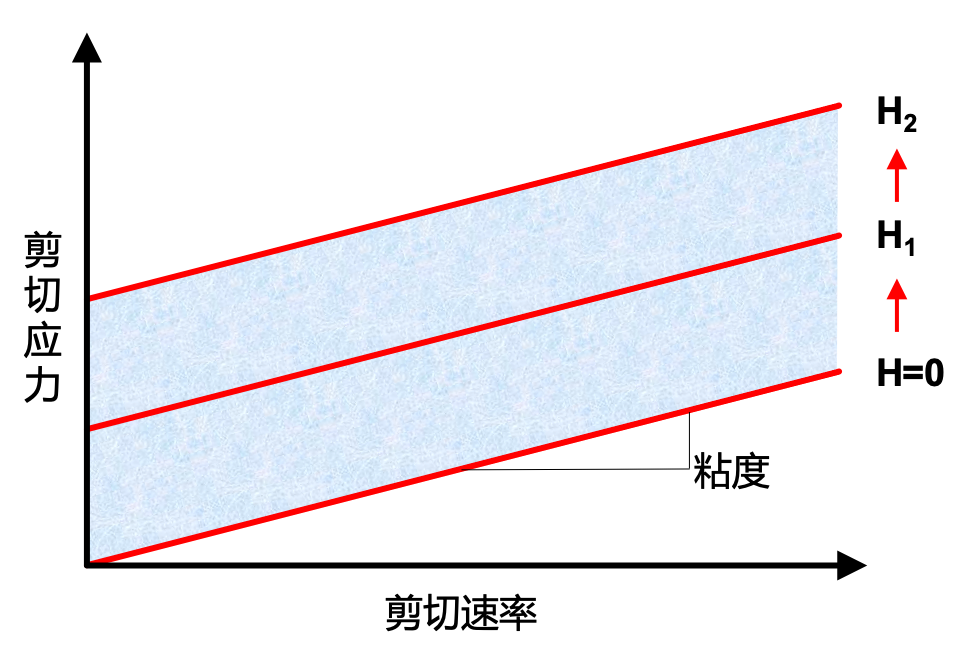
磁流变流体技术特点:
- 磁场下的流体特性类似Bingham材料(剪切应力=粘度 x 剪切速率+屈服剪切应力)τ = τ(H) + ηγ
- 屈服剪切应力大小由磁场控制,粘度不受磁场影响
- 几乎瞬间相应(0.1~0.2ms),连续变量阻力调,控制范围宽
- 机械结构简单,无明显磨损与沉淀
- 能耗低,工作温度范围广
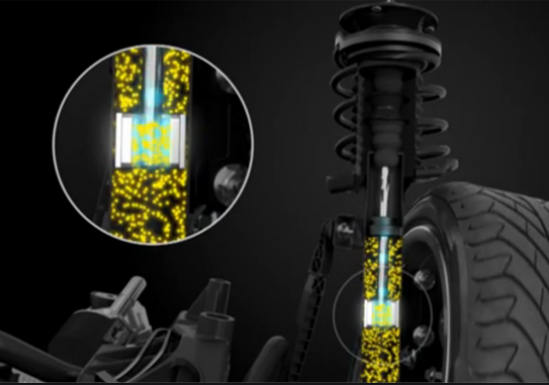
用电流大小实时控制阻尼强弱,配合以传感器及控制算法,以达到主动消除震动的效果,响应时间可达到毫秒级
使用电磁减振器,配合利用传感器、控制器及算法,迅速消除震动与噪声

磁流变技术还可以广泛应用于精密研磨、遥控触觉反馈等领域

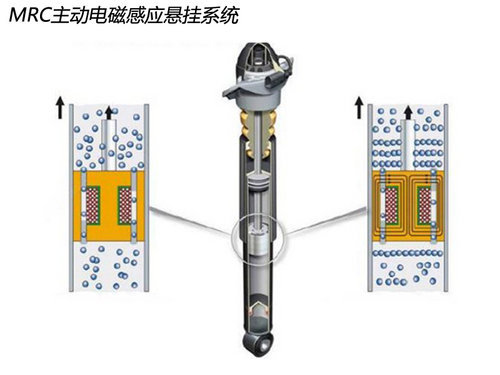
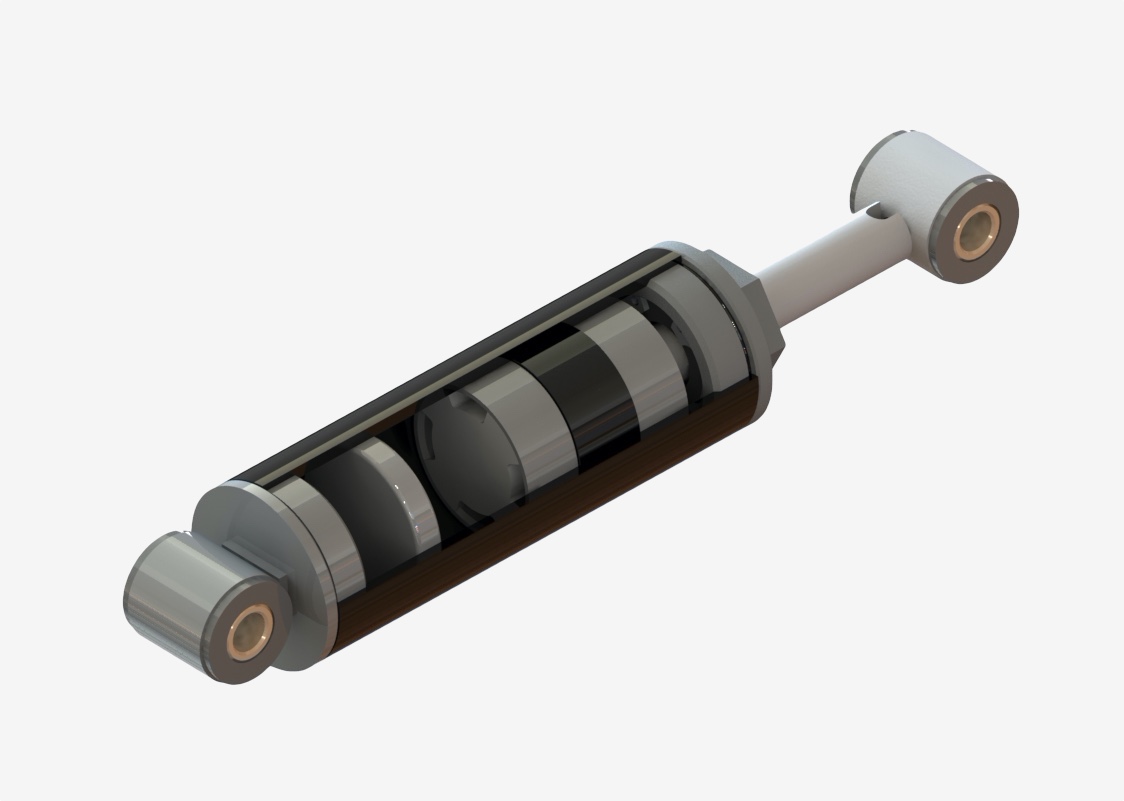
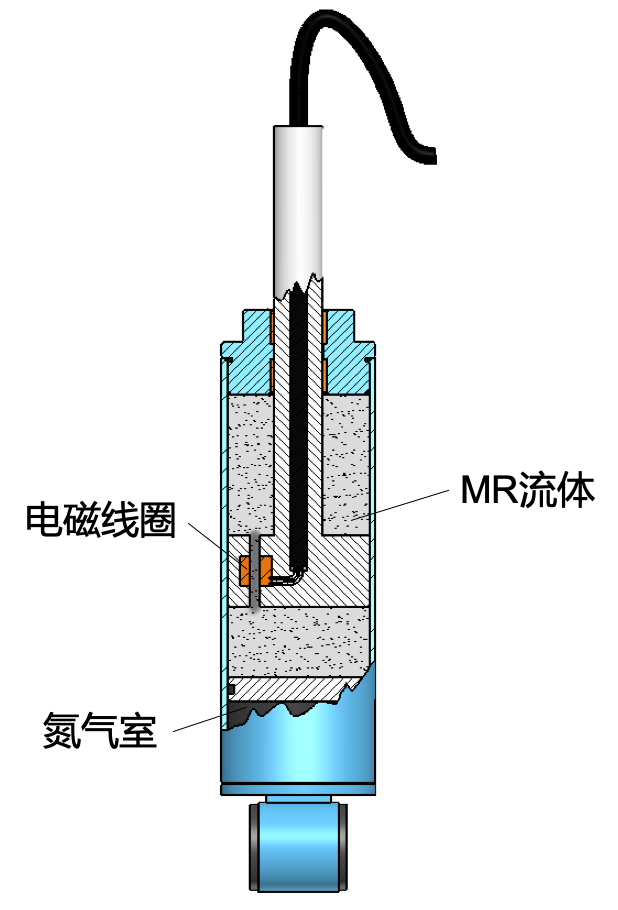
以不同电流控制活塞部位的磁场强度,可改变活塞通孔内磁流变流体剪切应力大小,从而精确控制阻尼器的阻尼强度。
电磁阻尼器有以下特点:
- 简单的机械结构,阀门无运动零件
- 低压控制,方式简单
- 阻尼力不与速度关联,(即使在低速或零速的情况下)可产生极大的阻尼力
- 连续可变的控制,精准输出
- 安全环保
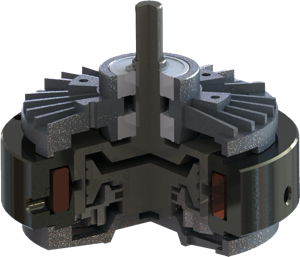
电磁阻器结构示意图
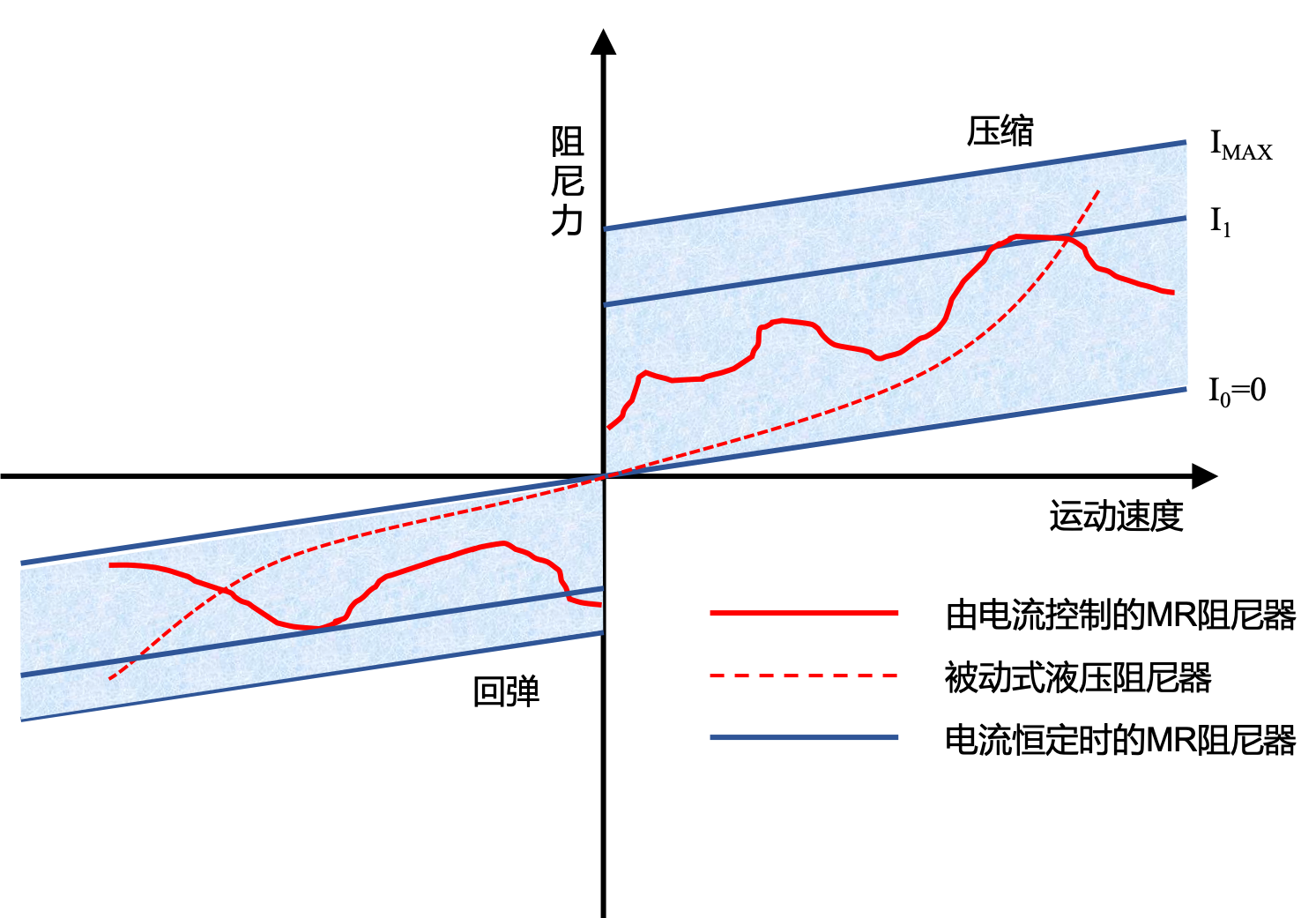
阻尼力与速度关系示意图
电磁阻尼器阻尼力与位移、速度或加速度的对应关系可任意控制
与此同时,根据剪切式的工作模式,阻尼器可以被设计成旋转式,具体应用在刹车、离合器等方面。
与传统机械结构的离合器相比,电磁离合器的扭力输出值可以实时精确调整,无磨损,使用寿命长,在高精控制等领域(如机器人、健身器材、医疗器械等)有极大的应用空间。

主动避震系统可通过传感器主动感知所遇振动的频率与幅度,主动预知振动拐点,在振动拐点主动改变阻尼(增大或减小)使整个系统更加平稳舒适。
|
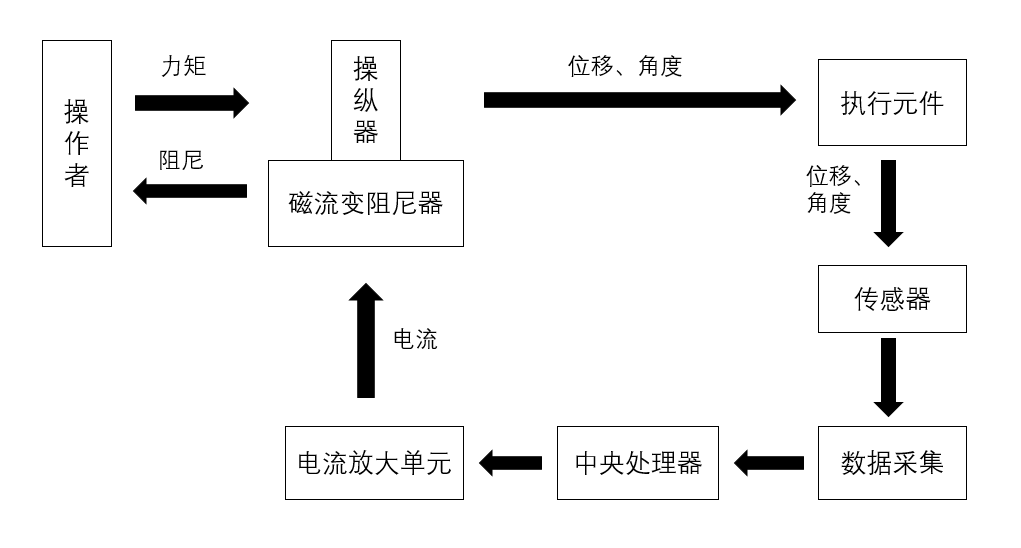
主动避震系统可应用于:汽车的电磁悬挂、座椅减震、医疗床(轮椅)的减震以及精密设备的减震。 主动避震系统包含:外部信息采集传感器(位移传感器、加速度传感器等)、中央处理控制器、电流放大单元以及磁流变减震系统。
|
|
主动避震系统的原理:通过位移传感器与加速度传感器采集当前震动频率与振幅,中央处理通过采集的信息器判断所需阻尼力,通过电流放大单元控制电流输出来控制磁场大小,输出相应阻尼,以达到主动避震的效果。

磁流变力反馈系统可应用于远程操作的真实感知、自动驾驶方向盘的真实反馈、医疗行业远程手术以及各种设备为用户提供的安全防呆感知。
磁流变抛光技术,是利用磁流变抛光液在梯度磁场中发生流变而形成的具有黏塑行为的柔性"小磨头"与工件之间具有快速的相对运动,使工件表面受到很大的剪切力,从而使工件表面材料被去除,达到高精度抛光效果。
磁流变抛光有以下特点:
- 亚表面损伤低
- 抛光精度高
- 温度适应范围广
- 无需磨头
- 可以适应不同异形工件抛光
- 抛光效率高
|
|
磁流变抛光原理:磁流变抛光过程中,由循环泵把磁流变抛光液输运到抛光区域,在进入抛光区域的时候,高梯度磁场使得磁流变抛光液发生磁流变效应,在抛光区由液体变化为类固体,这种类固体的缎带是一种柔性抛光模,通过抛光粉颗粒复杂的机械和化学耦合作用实现材料的表面去除 。 |